Our robot specialists perform the offline programming (OLP), based on the data out of the robot simulation. The real time motion algorithms are considered and a functional robot program is created with the usage of a specific software tool (RCS, Robot-Controller-Simulation) considering calibration points to calibrate robots and down loaded the robot programs from the simulation software to be uploaded later into the real robot controller.
All OEMs wants to introduce new vehicle with innovations in short span of time. The shortened time periods not only influence the time for product development but also influence the time to develop and launch the production lines in minimum time frame through use of advanced robotic simulation.
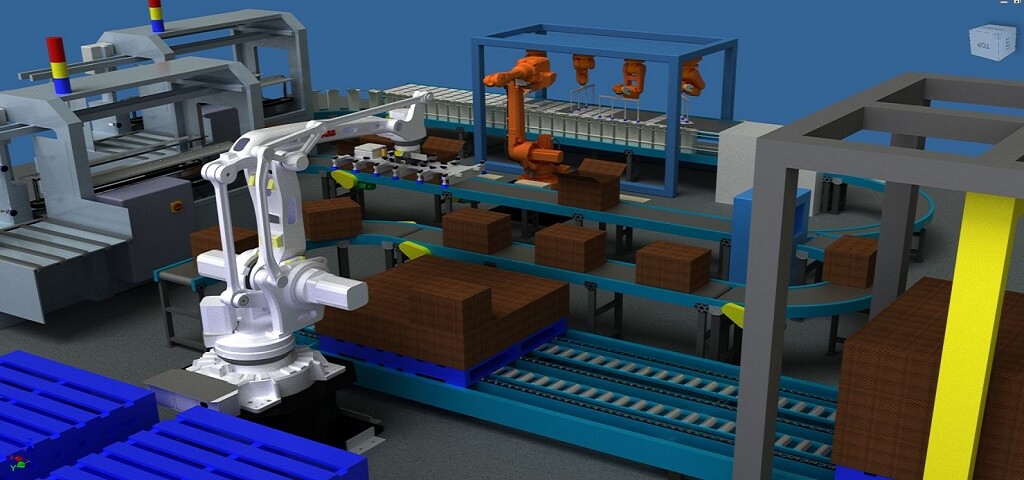
Our experienced employees ensure that the concepts out of planning, design and technology development can be realized based on real time 3D- Simulation cells performing reach ability analysis, cycle time analysis and detecting collision and lying down the foundation of overall processes by means of software applications.